MECHANICAL DESIGN
The Roamer
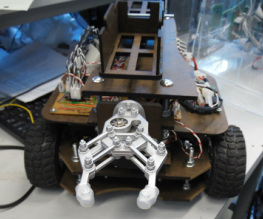
The ROAMER is used to navigate the surface of the alien planet and drag the miners to safety. The major components of the ROAMER are the drive train, the gripper, and the SPECIAL mount. Two motors are used to turn the wheels. They are connected via d-shafts and spider couples. The front of the ROAMER has a PVC hemisphere used for balance and as a skid. The gripper was purchased online and is actuated by a servo. It is mounted at the same height as the tabs on the door and cage containing the miners. The SPECIAL mount is on top of the ROAMER and can rotate 180 degrees when actuated by a servo. The SPECIAL houses a camera used in navigation of the ROAMER.
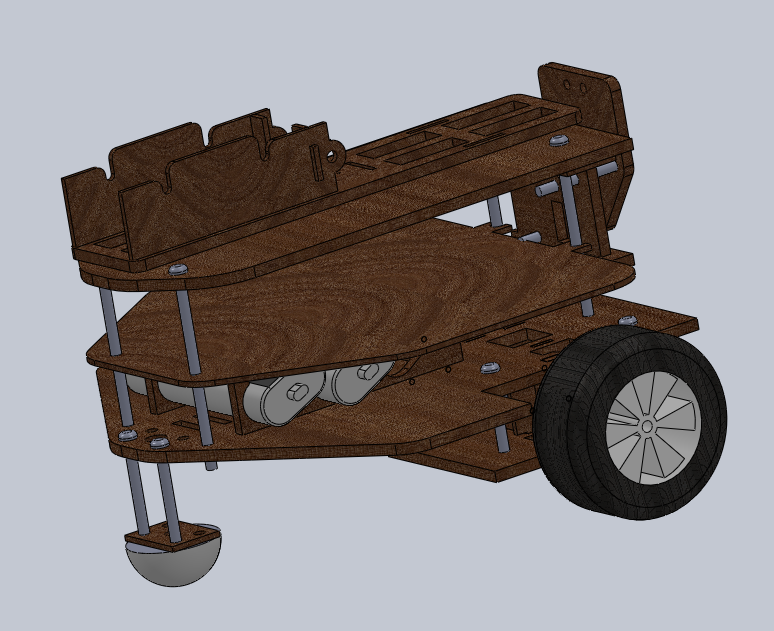
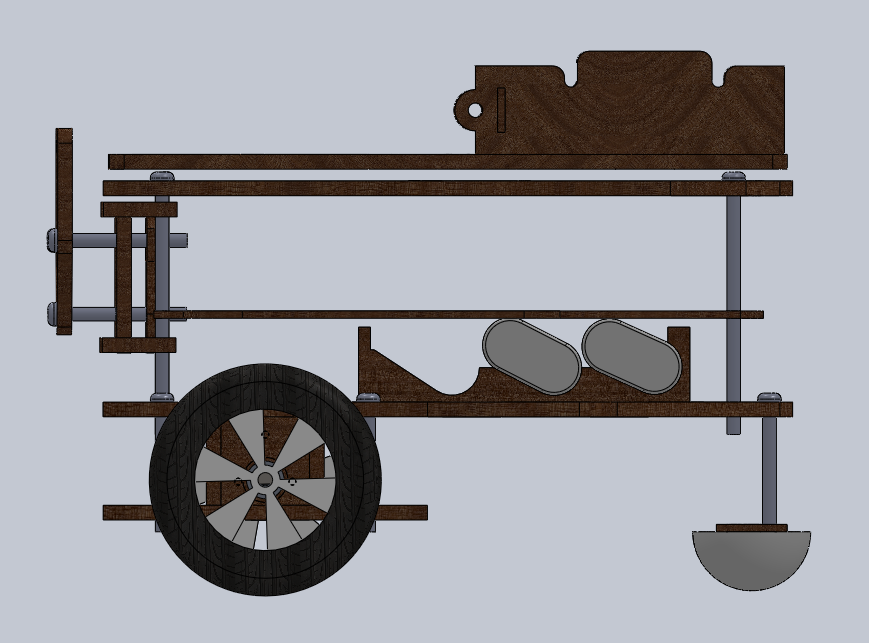
The To the left is an image of the ROAMER. Below are CAD assemblies of ROAMER.
For detailed drawings click here.
The To the left is an image of the ROAMER. Below are CAD assemblies of ROAMER.
For detailed drawings click here.
|
|
The POD
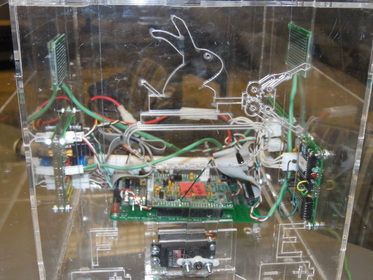
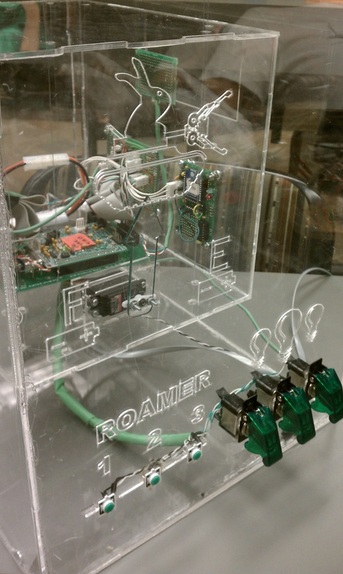
The POD is the controller used to communicate with and control the ROAMER. The POD theme is inspired by a wireless, non-contact concept reflected in the "floating" inner acrylic box holding all of the circuitry in the middle of the outer acrylic box. To control the ROAMER movement, the user wears a headset containing an accelerometer. The user must lean forward, backwards, left, or right to drive in any of those directions. Additionally, the user can close ROAMER gripper by placing her hands next to the centers of both sides of the box (near rectangular cutout seen below), and can open the ROAMER gripper by moving her hands away. Additionally, the user can select which roamer to connect to by pushing one of the buttons labeled 1, 2, or 3 on the bottom left of the box. The buttons light up when the ROAMER and POD have connected. The switches on the bottom right of the box are used to control the SPECIAL camera lights. Finally, the charge level of the SPECIAL battery is displayed by the acyrlic arrow mounted on a servo in the inner acrylic box.
For Soldiworks part files, click here.
For Soldiworks part files, click here.
|

|
